Inspired by the Graceful Movement of the Cuttlefish or Perhaps the Spanish Dancer Nudibranch, This Four-finned Robot Glides Through the Water with an Undulating Swimming Motion, Allowing for Efficient And…
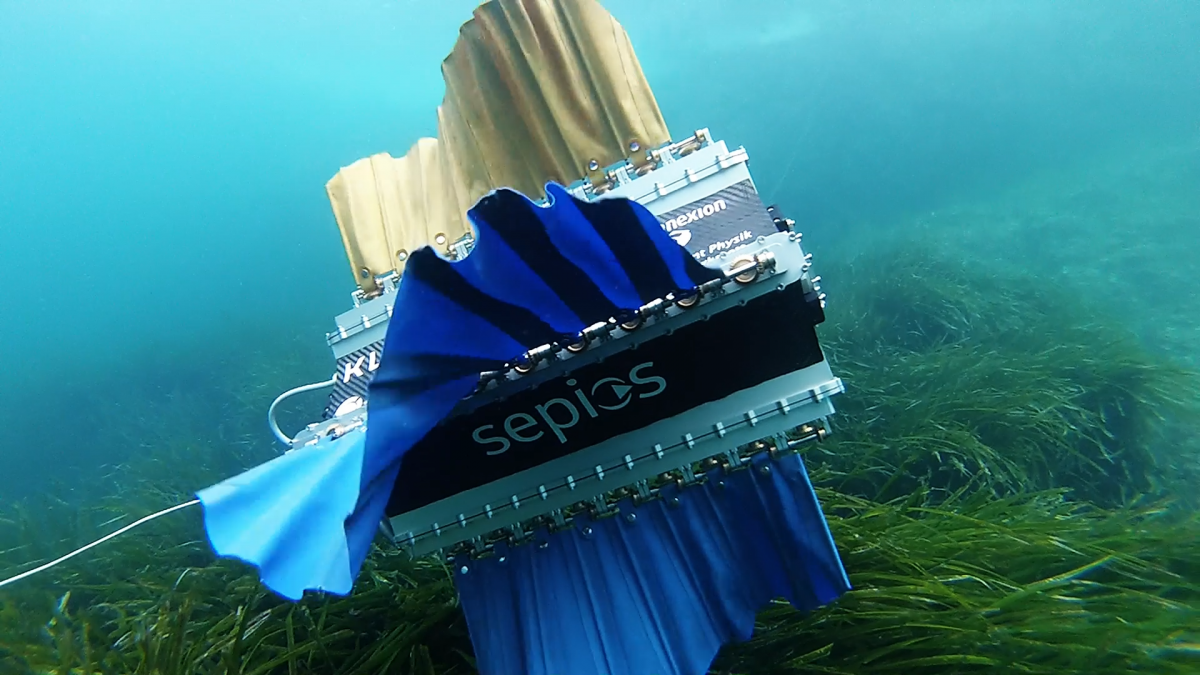
Inspired by the graceful movement of the cuttlefish or perhaps the Spanish Dancer Nudibranch, this four-finned robot glides through the water with an undulating swimming motion, allowing for efficient and agile motion.
A team led by Pascal Buholzer of the Swiss Federal Institute of Technology in Zürich developed the nautical robot Sepios, which demonstrates how environmentally friendly a finned design for propulsion can be, compared to the common propeller.
Underwater hazards such as seaweed and plants do not appear to pose a threat to Sepios as it effortlessly moves through them, even in turbulent conditions. The symmetrical arrangement of its fins allows Sepios to navigate in any direction. Furthermore, each individual fin can also be controlled for more precise movement.
Propeller noise also poses a threat to marine mammals. Not only does it stress whales and misleads dolphins, but deflected sounds can cause injuries or even death. In comparison, Sepios' propulsion system is nearly silent. There is some speculation that Sepios' aesthetic resemblance to a marine animal could also make it ideal for filming underwater wildlife.
Buholzer's team is currently working on improving the coordination of its onboard camera, laser, and inertial measurement sensors that will aid Sepios in avoiding collisions.